
 Here is one more example to illustrate VMC, and how targets change. We start with a cyclone. A perfectly well behaved cyclone.
Here is one more example to illustrate VMC, and how targets change. We start with a cyclone. A perfectly well behaved cyclone.
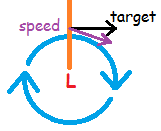
The storm just sits in place and maintains it’s strength. It’s not even that unrealistic, the tropical storm near Madagascar in SWR Leg 2 behaved like this, as do coastal effects. Now imagine that you have to sail a loop around the cyclone as fast as possible.
The first naive approach is to draw a line from the boat to the center of the storm. The target is orthogonal to this line, I’m trying to cross it as fast as possible. This gives the best angular velocity at your position.
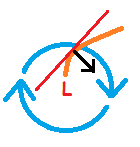 Of course in virtually any situation angular velocity calls for a smaller radius. The revised line is quite bent to get me closer to the center. I set an arbitrary limit for how close I can go, either because of windspeed, or because a realistic route would gybe long before the deepest point. You will find that a tangent to the bent line will pass somewhere ‘in front’ of the center.
Of course in virtually any situation angular velocity calls for a smaller radius. The revised line is quite bent to get me closer to the center. I set an arbitrary limit for how close I can go, either because of windspeed, or because a realistic route would gybe long before the deepest point. You will find that a tangent to the bent line will pass somewhere ‘in front’ of the center.
Now imagine a realistic situation, from A to B with a cyclone in the middle. A good route should look like this:
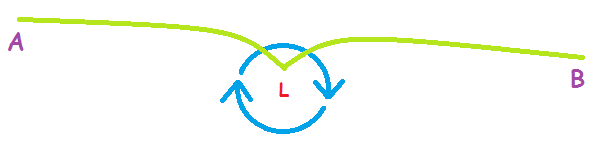
My targets work as follows: For the gybe, I draw a line to the center. (Tautological, if the cyclone is in fact round). When I enter the cyclone, lines pass ‘in front’ of the center. For the exit, lines go ‘behind’ the center. Now for all the time I’m talking about changes in VMC target, that is always the result of the curvature / distortion / gradient / whatever you want to call it. Away from the storm I go with the default assumption, a constant target. I then get something like this:

Now to be clear, I only wanted to highlight the concept a little, this isn’t really a method for determining targets yet. We’re not even accounting for the cyclone’s movement! Where would that even put the (virtual) center? And then you should try to match the cyclones speed and direction… Some food for though.